
Projects
Agentic Distributed System Ops
Order Lab @ UMich, May 2025–Present, Advised by Ryan Huang
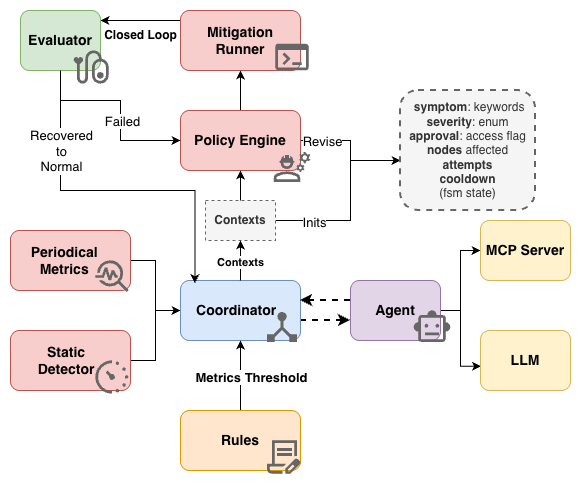
- Built an agent-based auto-mitigation loop (reproduce $\rightarrow$ measure $\rightarrow$ decide $\rightarrow$ mitigate) for common failures: overload, network latency/loss/partitions.
- Targets: Apache ZooKeeper/HDFS (3-node dev clusters); faults via ChaosBlade/Chaos Mesh and
tcnetwork controls; synthetic workload generators. - Mitigation: HAProxy (TCP routing/failover) and Resilience4j (circuit breaker, bulkhead, rate limiter) with self-implemented scripted rollback/timeout policies.
- Observability: Prometheus + JMX Exporter + ps/JVM Flags tracking SLO metrics
p99_latency,outstanding_requests, and System resources metricsIFACE_throughput,cpu_usage
Cuda Proxy Player
UMich CSE 582 Term Project (Advanced Operating Systems by Prof. Ryan Huang), Aug-Dec 2025
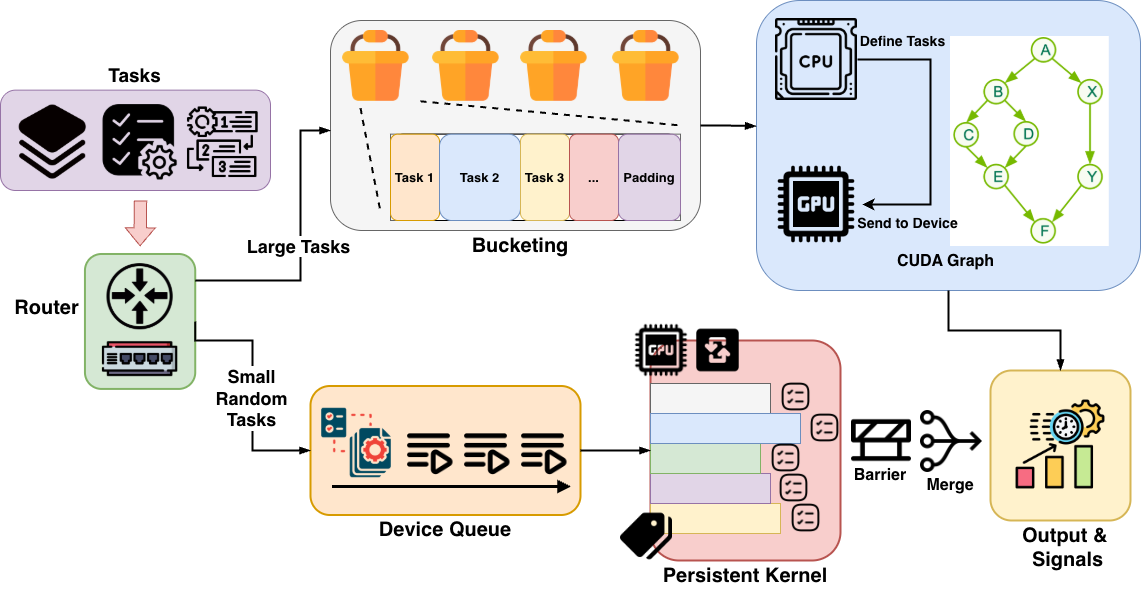
- Designed a hybrid CUDA runtime combining CUDA Graphs for stable compute paths and persistent kernels for irregular on-device tasks.
- Reduced kernel launch overhead and tail latency without brittle fusion, enabling dynamic routing and static graph reuse.
- Implemented bucket-based static pooling, piecewise graph capture, and stream-level synchronization for efficient MoE execution.
Cloud VLM for AV Control
UMich CSE 589 Term Project (Advanced Networking by Prof. Z. Morley Mao), Aug-Dec 2025
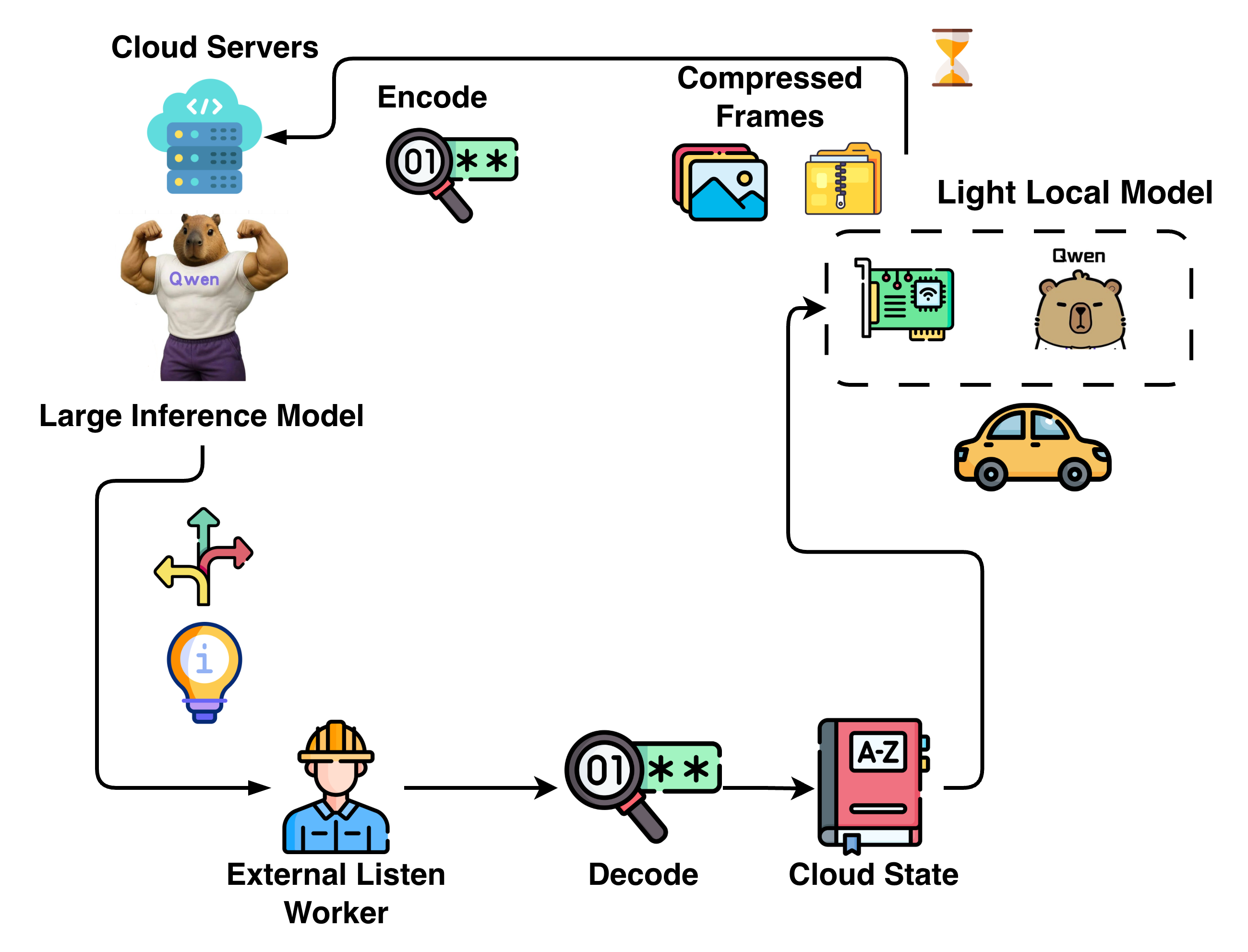
- Designed a hybrid local–cloud pipeline combining OpenEMMA and large VLMs for efficient & reliable decision-making.
- Selective offloading of static-scene context (e.g., construction, obstacles) to cloud models; dynamic agents handled locally.
- Network-aware control adapts send rate and compression based on latency to balance accuracy and responsiveness.
Simulated Basic Operating System
UMich EECS 482 (Introduction to Operating System with Special Topics), Jan–Apr 2025
- Threads: user-level thread library (
swapcontext/makecontext), Mesa monitors; interrupts/core-suspend; non-preemptive FIFO run queues. Thread library supports multiprocessor systems. - Pager/MMU: SWAP & FILE-backed pages; page tables with present/reference/dirty bits; COW lazy copying + Clock eviction; Supports
fork/mmapfor non-empty arena (process). - Network File System: inode-based, Unix-style NFS; Concurrency with Boost
shared/uniquelocks and hand-to-hand locking mechanism;
Networks
EECS 489 (Introduction to Networks), Jan–Apr 2025
- Mininet-style iperf: Custom Mininet topologies(python) with iperf-style RTT/throughput measurement(C++ sockets);
- Reproduce the buffer-bloat problems with long switch queue and asymmetric link capacities. Solved with ovs SDN control with 2 prioritized queues. (This belongs to CSE 589 project)
- Video Server emulation: Reverse proxy via
select+poll+ round-robin load balancing; DASH adaptive streaming. - Transport Layer emulation: TCP sliding window over UDP-style protocol (implemented GBN/SR rules, cumulative/selective ACKs);
- L3 router simulation with ARP, ICMP, basic intra-domain routing.
Security
EECS 388 (Introduction to Computer Security), Jan–Apr 2025
- Digital Forensics: disk image analysis, file carving, metadata extraction with Steganographic Tools;
- Cryptanalysis & cracking: length-extension, padding-oracle; John the Ripper (break encrypted PDF/ODT), Hydra (SSH).
- Web exploitation: auth bypass via XSS/SQLi/CSRF, write a simple “Samy-is-My-Hero” Worm Attack.
- Binary Attack (stack overflow attack): x86 assembly analysis and exploit development workflows using
gdb;- focused on stack-overflow patterns, return-oriented techniques (ROP chains), and bypass mitigations like ASLR and Stack Canary.
- Reverse Engineering: recover executable → C source logic (decompilation & manual analysis) with Ghidra and static analysis;
- combined with pwning to hack the UMich BBB Building’s stair light
Origami-Inspired Soft Robotic Arm
HDR Lab @ UMich, Sept 2024–Present, Advised by Xiaonan Huang

- Kresling origami + pneumatic actuation for confined-space manipulation.
- Led STM32 & Orange Pi firmware (dynamics/PID, CAN/I²C); C++/Rust core algorithms; contributed to PCB design.
- Demos/extended abstracts: ICRA 2025 Workshop (Best Poster), RoboSoft 2025 Workshop, ICON 2025.
LLM-Guided Manipulation with Flexiv 7-DoF Arm
Sirius Lab @ SJTU, Feb–Sept 2024, Advised by Yutong Ban
- Built an LLM-driven pipeline that turns natural-language instructions as well as RGBD visual inputs into executable manipulation plans on a Flexiv 7-DoF manipulator.
- Implemented FK/IK and motion planning with Flexiv RDK; integrated ZED depth perception for scene understanding and grasp placement.
- Designed a constraints-aware controller (joint/velocity/workspace limits) with smooth trajectories.
- Combined simulation data with real runs to improve task reliability.
Auto Sentry Robot Control
RoboMaster @ SJTU, 2023–2024, Won National Championship in the 2023 RoboMaster Competition (Awarded by DJI)

- STM32-F407 platform; dual-gimbal stabilization with optimized PID controller; high-response 4 steering wheel chassis.
- CAN/UART pipelines for CV/LiDAR;
- IMU-based absolute-pose control.
- High precision shooting with flywheel speed & lead-angle compensation.