
2. Lamport Clock, RSM
Overview
本简报回顾了分布式系统中逻辑时钟的核心概念, 其在处理事件排序方面的必要性, 以及它如何解决传统时间戳的局限性;重点介绍了"先行发生" (Happens-Before) 关系, Lamport 逻辑时钟的构造与规则, 以及如何通过扩展逻辑时钟实现分布式系统中的全序 (Total Ordering);
分布式系统的时序共识背景
分布式系统被定义为"a set of distinct process, 通过 exchange message 进行通信, 具有 non-neglegible communication latency, 并 not sharing fate";
这意味着系统中的不同部分:
- 在空间上是分离的
- 它们之间的通信存在延迟
- 并且一个部分的故障不会自动导致其他部分的故障
关键问题
- 状态依赖性: 如果对消息的响应取决于该消息以及(某些)过去的消息, 那么计算就是有状态的 (stateful);这通常建模为有限状态机;
- 容错性与复制 (Fault-Tolerance and Replication): 为了容忍故障 (这里主要指网络或者机器坏了), 需要对状态进行复制; 复制副本之间必须相互通信, 由于通信延迟不能忽视且未知, 因此复制副本在时间上是分离的
- 意思是当完成复制的时候时间戳应该是创建主机上的, 表示在创建的主机上完成了第i个操作之后进行缓存
- 但是这个时钟和存贮主机的时钟如果没有共识或者说不一致, 那么这个时间戳就没有意义了;
- 保证一致性: 必须保证复制副本的"答案"最终一致; 这通过"保证单一的更新顺序"来实现;
- 如果两个机器上进行的操作并发但是顺序不同, 导致结果有细微差异那么在这两个主机的备份内容就会不一致
传统时间戳的局限性与因果关系
在分布式系统中, 不能使用"挂钟"时间(wall-clock time)来强制执行事件排序, 因为:
- 时钟漂移: 物理时钟会漂移, 导致__不同机器上的时间不一致__;
- 单调性可能被违反: 时钟同步是具有挑战性的, 因为"timestamp is X"的消息可能被任意延迟; 即使假设对称延迟 (RTT/2= transmition delay), 也并非总是如此, 有时我们需要更强的保证;
- 核心思想: “A little ‘not knowing’ makes some things easier.”
因果 (Causal) 关系
逻辑时钟基于因果关系的概念, 即事件 A 是否可能影响事件 B;
- 这里的 可能 的意思是 A 的输出传递给 B, B 视为一个函数, 可以对传入做任意处理, 所以是可能影响
- “如果 A 可能影响了 B, 那么 A 必须在 B ‘之前发生’;”
- “如果 B 可能影响了 A, 那么 B 必须在 A ‘之前发生’;”
- “如果两者都不是真的: 事件排序’无关紧要’;”
逻辑时钟: 保证因果顺序
逻辑时钟"保证保留因果关系(重要的事情), 允许任意排序不重要的事情;" 这其实是一种削弱的排序, 只要求保持部分有序, 那么其实就是拓扑排序的思路
术语定义
- A “happens-before” B (A -> B): “当且仅当 A 可能是事件 B 的输入的一部分”;
- C “is-concurrent-with” D (C || D): “当且仅当 C 不 -> D, 且 D 不 -> C”;
目标: 我们希望有一组"时间戳" T, 使得"如果 A -> B, 那么 T(A) < T(B) 得到保证";
注意: 反之不一定成立 “T© < T(D) 不意味着 C -> D”;
定义先行发生关系的三种事件
分布式系统中有三种事件:
1. 内部事件 (internal events)
2. 发送消息 (send events)
3. 接收消息 (receive events)
先行发生关系的规则
- 同一进程内: “在同一进程中, 如果 a 发生在 b 之前, 那么 a -> b;”
- 消息传递: “如果 c 是消息 b 的接收事件, 那么 b -> c;”
- 传递性 (Chain Rule): “如果 a -> b 且 b -> c, 那么 a -> c;”
Lamport 逻辑时钟的构造
Lamport 逻辑时钟(也称逻辑时钟)通过以下规则将先行发生关系编码为时间戳:
初始化: "每个进程 维护一个本地时钟 ", 初始值可以任意;
时钟更新规则
- “在执行事件之前, -> ;” (每个事件发生前, 本地时钟递增)
- “如果事件 B 有一个内部前驱 A, 那么 T(B) 必须大于 T(A);”
- 消息发送规则: “在任何消息 M 中发送本地时钟;”
- 消息接收规则: "在接收时, 将时钟 设置为 ", 其中 是消息中携带的发送方时钟值;
- “如果事件 R 是某个消息 M 的 接收 事件, 并且 M 是作为事件 S 发送 的, 那么 T® 必须大于 T(S);”
时钟条件
- “每个事件 e 都有一个时钟时间 C(e);”
- “如果 a -> b, 我们保证 C(a) < C(b);”(通过构造证明)
- “反之不成立: C(j) < C(k) 不保证 j -> k;”
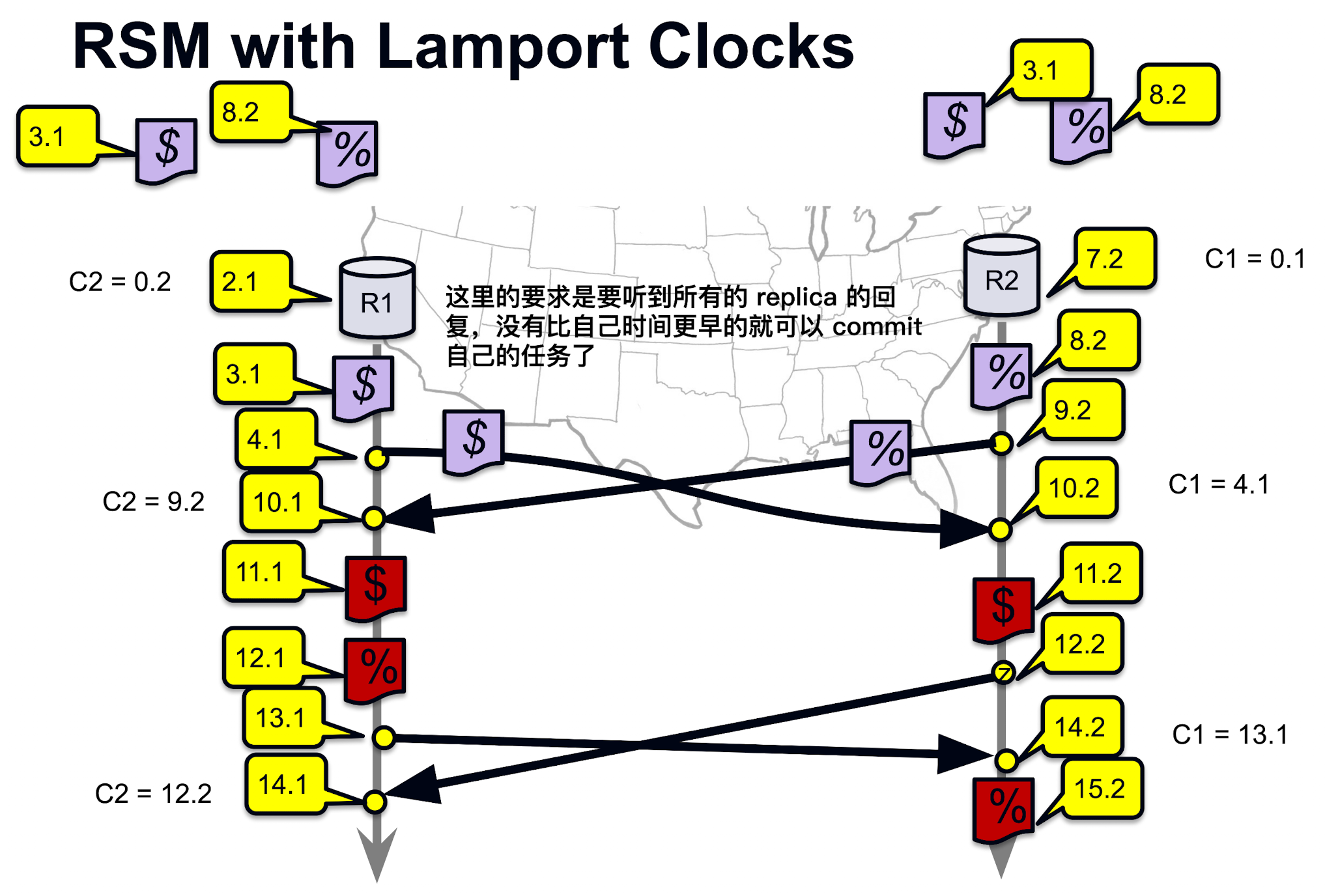
应用于复制状态机(RSMs)
复制状态机要求"机器必须按 LC顺序 应用所有操作", 即"必须有一个所有事件的单一全局顺序";
核心思想
“每个操作 O 都有一些逻辑时钟时间 T;”
“当我知道所有其他复制副本至少已推进到 T(O) 时, 才应用 O;”
这意味着"我们已经收到了所有 U -> O 的更新;"
如何知道这一点? “收到一条发送时间 S >= T(O) 的消息;”
处理并发事件
“如果两个事件 A 和 B 之间: A 不可能是 B 的(直接/间接)输入, B 也不可能是 A 的(直接/间接)输入;”
“那么我们可以以任何顺序应用它们;它将产生一个可能发生的顺序, 没有人能说它不是实时发生的顺序;”
六, 生成全序(Total Ordering)
Lamport 逻辑时钟虽然保证了因果顺序, 但无法保证所有并发事件在所有副本上都具有相同的相对顺序;为了实现全序, 可以扩展逻辑时钟:
Break Tie: “通过将节点 ID 附加到每个事件来打破平局;”
全序规则: 进程 Pi 用"时间" Ci(e).i 标记事件 e;
C(a).i < C(b).j 当:
“C(a) < C(b) 或者”
“C(a) == C(b) 且 i < j”
"没有两个事件会有 C(a)==C(b) 且 i==j;"因此, “所有事件都被(全局地! )排序;”
Communication & Acknowledgement
在分布式系统中, 知道对方收到了消息(例如"foo() 已修复, 可以预期")是一个挑战;
相互告知: "你必须告诉我! ","我必须告诉你! "这种"我知道你收到, 你知道我收到, 我知道你知道我收到…"的递归问题似乎无解, 无法最终验证是否具有确认收到的信号;
解决方案: “heartbeat 心跳消息” 是一种方式;
"任何消息交换都会更新时钟, 即使是那些只为了更新时钟的消息! "(例如, “still alive!”)
LC 的特性和局限
- 事件而非时间 (Events, not time)
- Lamport "时钟"并不测量物理时间, 而是事件的因果链长度
- 独立漂移 (Independent drift)
- 不通信的节点逻辑时钟可以随意漂移, 但不影响一致性
- 因果与影响 (Causality & influence)
- 因果性表达观察者对结果的期望
- 并发事件虽然无因果, 但需在所有副本保持相同顺序
LC 两个共识性应用
因为 LC 确保的事件的因果顺序 (Causal Relationship), 但是如果两个在 LC 定义下是并发的事件, 那么它们顺序是可以任意的, 但是在实际的分布式复制情况下, 这种并发并不一定好:
比如 中国银行有两个数据中心分别在北京和上海, 北京的数据中心有一个操作是利息10元, 上海有一个操作是扣税 1%, 那么二者实际上并不存在逻辑的因果关系, 但是其先后顺序会影响到一个用户的最终存款项内容 (这里的数学问题更加像涨薪10%和减薪10%)
分布式设计者的目标是确定一个 total order (不一定对用户最有利, 尤其是雇佣方是银行).
但是 LC 在逻辑上已经给了一个因果全局时钟共识, 我们这里要做的应该是利用这个共识来实现 (非因果) 操作上的逻辑一致
参考计算机界有名的 (图灵) 状态机设计, 如果一个状态机的输入是确定的, 那么其输出也是确定的 deterministic
利用 Lamport Clock 的因果顺序, 我们可以在 分布式系统中实现两种关键的共识机制:
- RSM (Replicated State Machine) 复制状态机
- Primary/Backup 主备复制
复制状态机 (RSM, Replicated State Machine with Lamport Clocks)
状态机复制是实现容错服务的一种常规方法, 主要通过复制服务器, 并协调客户端和这些服务器镜像间的交互来达到目标
– Wikipedia
- 算法原则
- 每个操作 (operation) 都带时间戳 (timestamp, 但是这里指的是 Lamport 时钟的时间节点)
- 仅当所有副本都至少推进到该时间戳时才能执行
- 队列 (queue) 按时钟顺序存储待提交更新
- 可以确认无更早更新时提交队首元素
- 等待问题 (Waiting)
- 可能需要等待很久(若没收到其他副本消息)
- 包括网络延迟和网络断联, 节点宕机等
- 比如上面的例子中, 北京的数据库更新的一个新的存款, 而上海如果没有收到北京的更新, 就永远无法提交这个更新(上海根本不知道发生了什么)
- 心跳 (heartbeat) 交换时钟, 证明存活
- 前面简单提及过, 如果用 Ack 来验证收到, 可能会陷入无限递归
- 可用 undo log 容忍临时不一致 (temporary inconsistency)
- 可能需要等待很久(若没收到其他副本消息)
RSM 方案局限与问题
- 失败阻塞 (Failure blocking)
- 如果某个副本宕机, 其他副本可能被阻塞无法提交, 因为节点依赖于其他所有在线的 node 成功 commit 的反馈
- Lamport 时钟在失败场景下成为"死胡同" (因为 LC 完全依赖于 communication 来实现局部 consensus 从而递推达到全局 consensus)
主备复制
解决 RSM 的一个方法是使用 主备复制 (Primary/Backup Replication);
这会在下一份笔记中详细介绍
对比总结 (Comparison Summary)
| 特性 (Feature) | 复制状态机 (Replicated State Machine, RSM) | 主备复制 (Primary/Backup Replication) |
|---|---|---|
| 一致性 (Consistency) | 所有副本按相同顺序执行操作 (deterministic order) | 主节点先执行并同步到备份 (primary first, then backup) |
| 排序机制 (Ordering) | 借助逻辑时钟 (Lamport clock) 或向量时钟 (vector clock) | 主节点天然决定顺序 (primary decides order) |
| 容错能力 (Fault tolerance) | 副本失败可能导致阻塞, 需要共识协议支持 (e.g. Paxos, Raft) | 主节点失败需选举新主, 备份失败相对容易替换 |
| 性能 (Performance) | 通常需要额外消息交换, 等待所有副本确认 | 性能较高: 客户端只与主交互 |
| 一致性模型 (Consistency model) | 可实现强一致性 (linearizability), 但依赖协议复杂度 | 保证外部一致性 (external consistency), 内部可暂时不一致 |
| 适用场景 (Use cases) | 分布式数据库, 强一致性存储系统 | 任务分配器 (MapReduce Master), 银行账户等主从式系统 |