
Piecewice Constant Curvature Soft Robotic Arm Geometrics and Dynamics
Geometrics
Space Definition
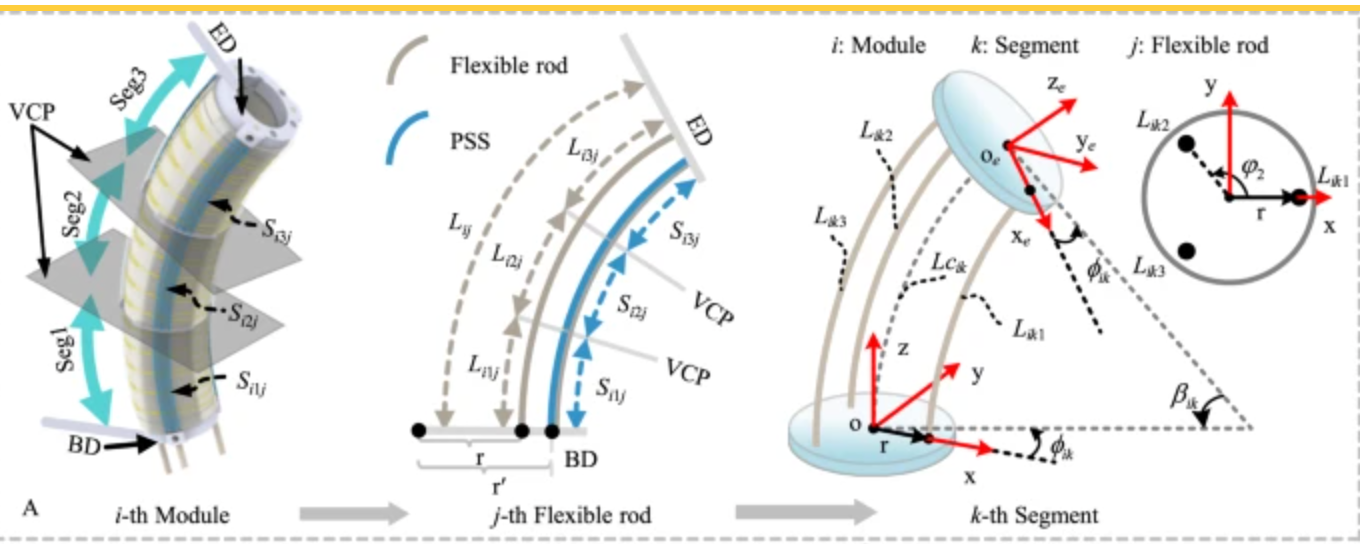
Each segment has id (k = 1, 2, 3 …), in our current model it is k=2. Each segment is modelled by three actuation variables. means the -th actuation length ( = 1, 2, 3). The actuation length is not the same as the stick length. The variables in actuation and configuration space can be expressed as and respectively.
Actuation Space
actuation space is consist of 3 actuators’ length , , and .
Configuration Space
configuration space for our fix-base robotic arm is which is the same as the spherical coordinate.
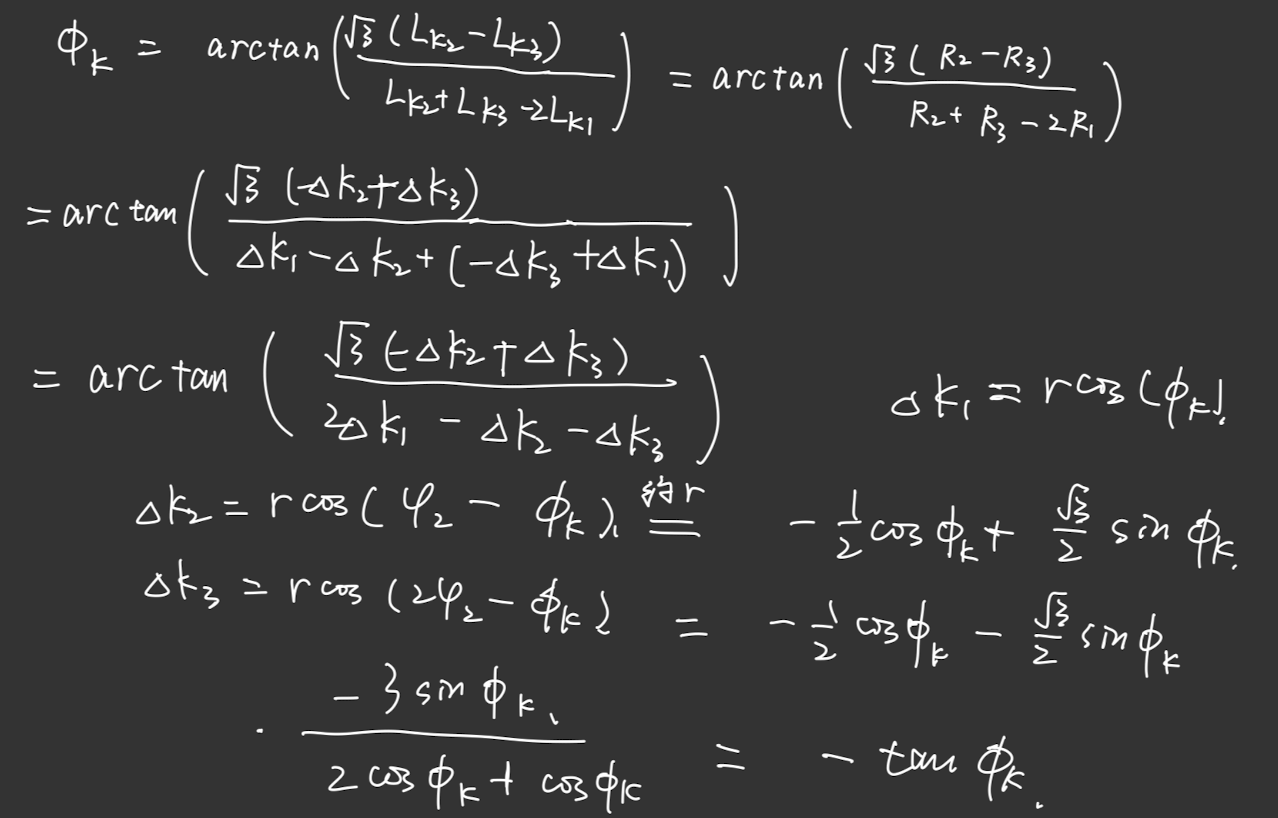
And denotes the curvature and denotes rotation angle about z-axis.
Or can be expressed as the arc length , and that can be expressed as the arm center’s length which is the average of the 3 origamis’ length.
The equations and images are shown below:
- where and the angles definitions are shown in the figure below.
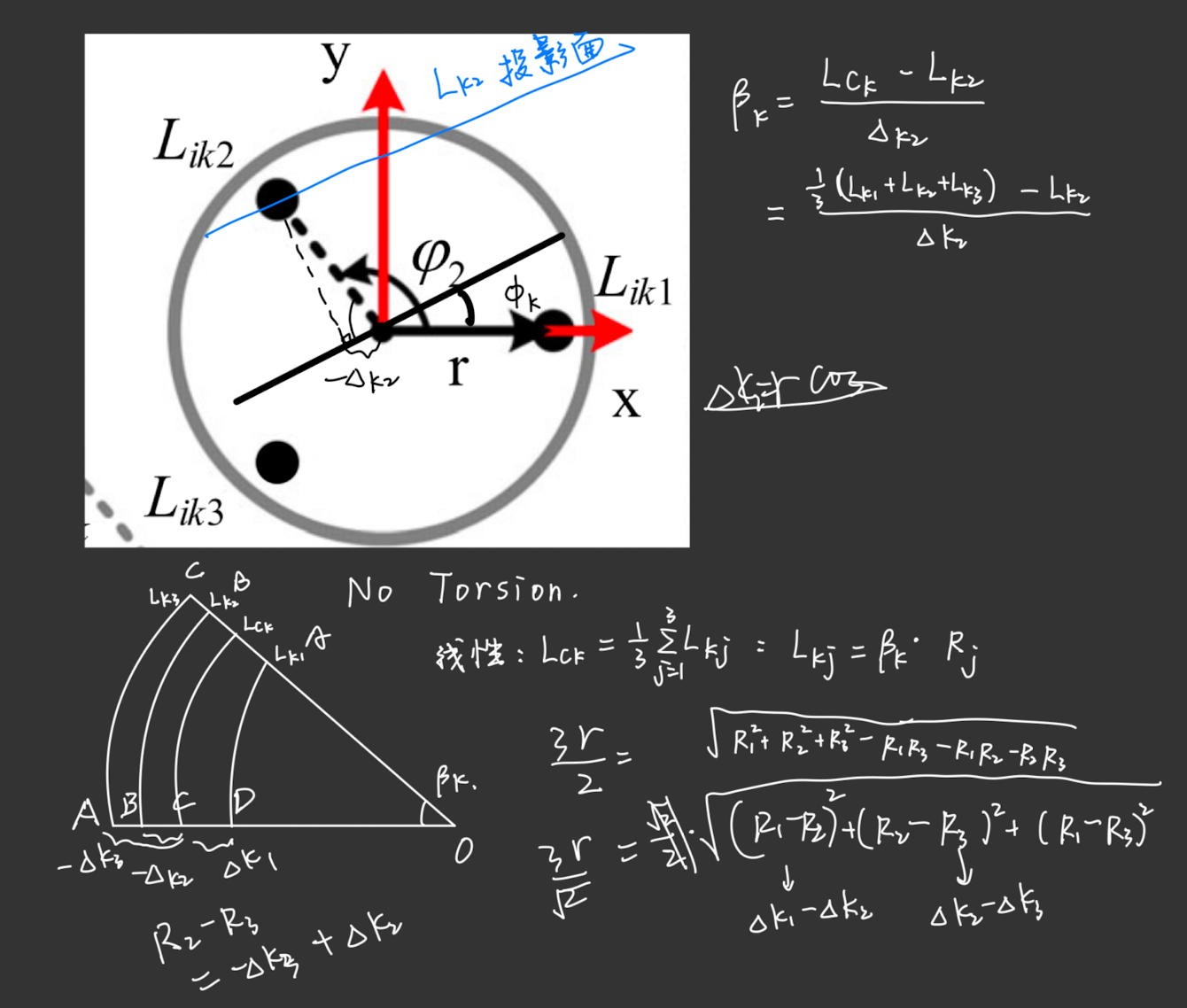
and - , all the equations are shown in the figure below or above
Rotations and Positions
the rotation can be expressed as 3 unit rotations about Z axis -> Y axis -> Z axis.
Thus the rotation can be expressed as:
where is the section id, and the resulting matrix is:
And then for the position vector it is
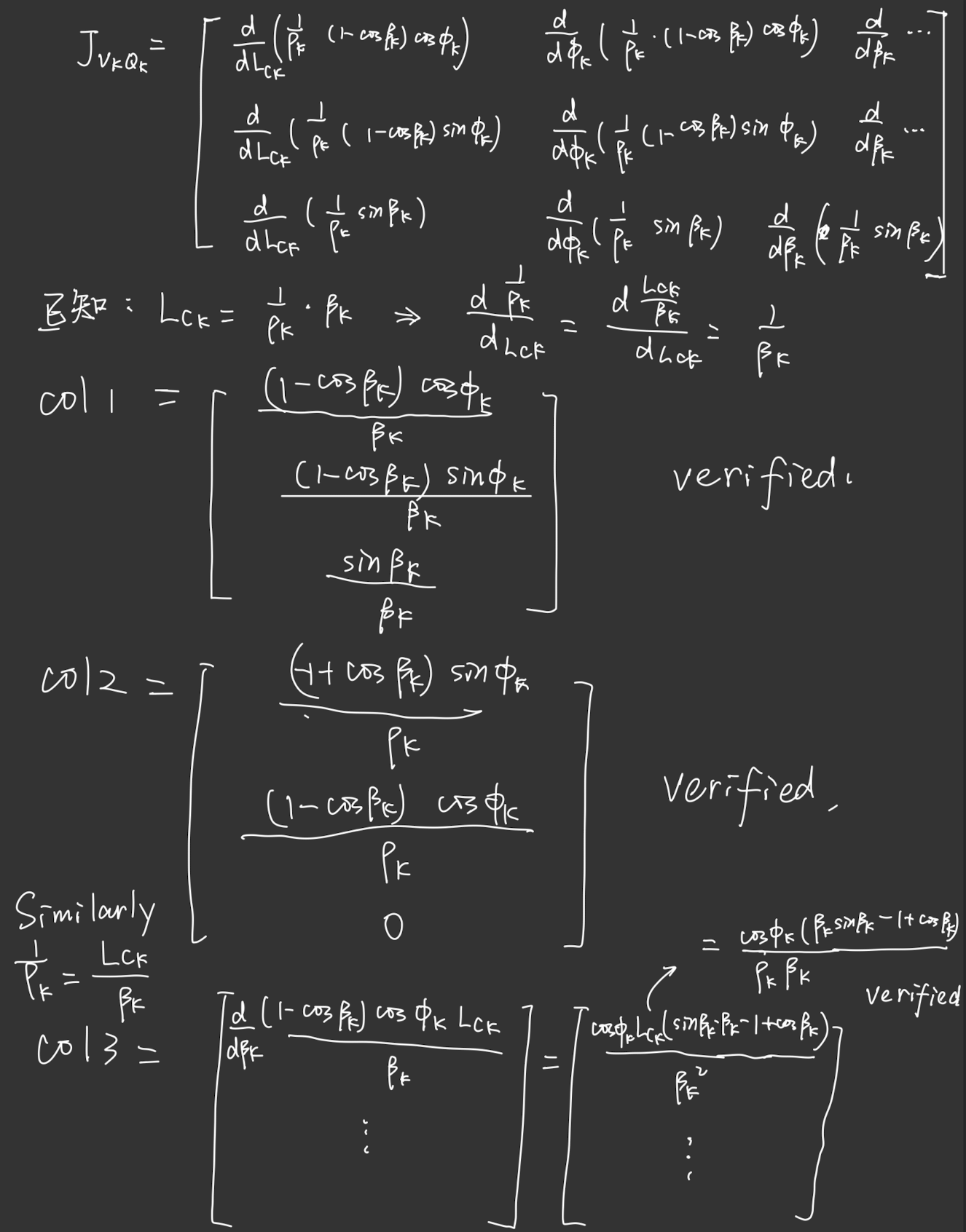
\mathbf{P}_k^{k-1} = \frac{1}{\rho_k} \begin{bmatrix} (1 - \cos\beta_k)\cos\phi_k ,\ (1 - \cos\beta_k)\sin\phi_k ,\ \sin\beta_k \end{bmatrix}^T
And putting them together in 1 transformation matrix is like:
the above matrix shows the transformation from the k-th arm section to the (k+1)-th arm section, namely we keep right multiply the transformation matrix from the initial base coordinate and get:
Dynamics: Jacobian for Space Transformation
Actuation and Configuration
Since the actuation space can be expressed as the
Then for the multisection’s transformation, we need to map from to , which means that the Jacobian has dimension of . Thus, for stacked sections, it can be expressed as:
proof
The dynamic equation should be in the form that and the higher level should be added with , since the base velocity should be added ahead.
Configuration Space to Task Space
The configuration space and task space are all in 6 dimension: 3 dim for position displacement and 3 dim for angular rotation.
Thus we split the Jacobian into 2 parts:
() where for single section, is
Position Term
The total calculation is from all the 3k origamis’ length to the endpoint’s velocity:
which is .
For a single vector, by differentiate the position vector P with , and then we could obtain the following:
the detailed derivation is as the following:
And then the recurrence relation can be expressed as the following:
J_{v_k, Q_k} = \begin{array}{c} [ \left (J_{v_{k-1}, Q_{k-1}} - \left (R_k^0 P_k^{k-1}\right)^\wedge J_{\omega_{k-1}, Q_{k-1}}\right ) \ \left( R_k^0 J_{v_k, Q_k}^l \right) \end{array}]
skewed symmetric matrix
Operator is the skewed symmetric matrix, which turns the vector into a matrix in the form of
and multiply it with a vector is the same as cross product. Multiplying it with a matrix is the same as doing cross product with each column.
proof
By the dynamic equation, we have relation of velocity:
namely the new velocity in the new FoR, it adds up the FoR velocity, relative velocity to fixed point and the angular velocity of the new FoR, and also we could write it in the form with no relative velocity (in pure rotation):
thus in Jacobian space, we could write as
J_{v_k, Q_k} = \begin{array}{c} [ \left (J_{v_{k-1}, Q_{k-1}} - \left (R_k^0 P_k^{k-1}\right)^\wedge J_{\omega_{k-1}, Q_{k-1}}\right )^T \ \left( R_{k-1}^0 J_{v_k, Q_k}^l \right)^T \end{array}]^T
The is the position vector rotated to the -th coordinate and is still the displacement vector
Multiplied by a vector of k sections of configuration space, we could set them to and the jacobian can be written as and thus we have the result
which is a vector.
Namely the velocity of the end point is the transformed sum of all previous sections’ velocities, which is proven above.
Angular Term
The total calculation is from all the 3k origamis’ length to the endpoint’s angular velocity:
which is .
Consider a single section, the Jacobian is simply a coordinate transformation from spherical to world coordinate:
- : since in the rotational spherical space, the radius of the ball is at constant, thus its 0 in 3 coordinates
- : since for the rotation is about the z-axis, thus the angular velocity is
- : this is the rotation about the radial direction.
Then for the stacked sections, the recurse relation is as the following:
Since the Jacobian needs first be transformed into the (k-1)-th coordinate, it should be multiplied by the rotation matrix first.
proof
multiplied by a vector of k sections of configuration space, we could set them to and the jacobian can be written as and thus we have the result
which is a vector.
Namely the angular velocity of the end point is the sum of all previous sections’ angular velocities, which is easy to prove in dynamics.
Conclusion
The Jacobian from the actuation space to the task space is
Reference
[1] K. Xu and N. Simaan, “Intrinsic Wrench Estimation and Its Performance Index for Multisegment Continuum Robots,” in IEEE Transactions on Robotics, vol. 26, no. 3, pp. 555-561, June 2010, doi: 10.1109/TRO.2010.2046924.
keywords: {Performance analysis;Robot sensing systems;Surgery;Force sensors;Magnetic resonance imaging;Force measurement;Force feedback;Design automation;Spine;Haptic interfaces;Continuum robots;force sensing;haptic feedback;performance index;surgical assistant},
[2]B. Zhao, W. Zhang, Z. Zhang, X. Zhu and K. Xu, “Continuum Manipulator with Redundant Backbones and Constrained Bending Curvature for Continuously Variable Stiffness,” 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018, pp. 7492-7499, doi: 10.1109/IROS.2018.8593437. keywords: {Manipulators;Electron tubes;Kinematics;Friction;Tendons;Strips;Lead},
[3]Wang, P., Xie, Z., Xin, W. et al. Sensing expectation enables simultaneous proprioception and contact detection in an intelligent soft continuum robot. Nat Commun 15, 9978 (2024). https://doi.org/10.1038/s41467-024-54327-6
[4]B. A. Jones and I. D. Walker, “Kinematics for multisection continuum robots,” in IEEE Transactions on Robotics, vol. 22, no. 1, pp. 43-55, Feb. 2006, doi: 10.1109/TRO.2005.861458.
keywords: {Robot kinematics;Robot sensing systems;Medical robotics;Manipulators;Hardware;Spine;Shape control;Legged locomotion;Pneumatic actuators;Tendons;Biologically inspired robots;continuum robot;kinematics;tentacle;trunk},